|

Разделызарубежныйх стран России произведений криминология гражданская оборона география геодезия программирование |
Механизмы компрессораМеханизмы компрессораКУРСОВОЙ ПРОЕКТна тему: «Механизмы компрессора» 1. Структурный анализ механизмов 1.1 Структурный анализ рычажного механизма
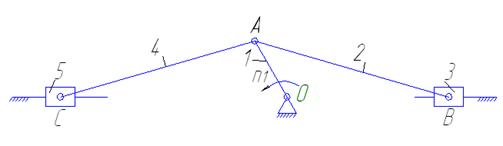
Рисунок 1.1. Подвижные звенья механизма 1-кривошип 2-шатун 3-ползун 4-шатун 5-ползун Кинематические пары. О (0-1),вр.,5 кл. А (1-4),вр.,5 кл. А'(1-2),вр.,5 кл. В (2-3),вр.,5 кл. В'(3-0),пост.,5 кл. С (4-5),вр.,5 кл. С'(5-0),пост.,5 кл. Найдём число степеней свободы. Запишем формулу Чебышева. W=3∙n-2∙P5-P4 (1.1) Где, W-число степеней свободы, n-число подвижных звеньев, P4 - число пар 4-го класса, P5 - число пар 5-го класса. W=3∙5-2∙7=1 Число степеней свободы рычажного механизма равно 1. Разобьём механизм на группы Асура и рассмотрим каждую группу в отдельности.
A'(1-2)-внешняя B'(3-0)-внешняя B (2-3)-внутренняя W=3∙2-2∙3=0 II кл. 2 вид Рисунок 1.2
А (1-4)-внешняя С' (5-0)-внешняя C (4-5)-внутренняя W=3∙2-2∙3=0 II кл. 2 вид
O (0-1) W=3-2=1 Рисунок 1.4 Составим
структурную формулу: Механизм является механизмом 2кл.,2в.. 1.2 Структурный анализ зубчатого механизма
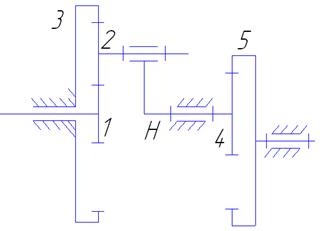
Рисунок 1.5. Подвижные звенья механизма 1 центральное колесо 2 – сателлит 3 – зубчатое колесо H – водило 4 – зубчатое колесо 5 – зубчатое колесо Кинематические пары. (1-0),вр.,5 кл. (5-0),вр.,5 кл. (2-H),вр.,5 кл. (4-0),вр.,5 кл. (1-2),вр.,4 кл. (2-3),вр.,4 кл. (4-5),вр.,4 кл. Найдём число степеней свободы. Исходя из формулы Чебышева имеем, W=3∙4-2∙4-3=1 Число степеней свободы зубчатого механизма равно 1, следовательно, данный механизм является планетарным. 1.3 Структурный анализ кулачкового механизма
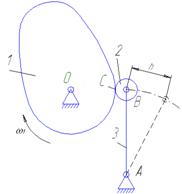
Рисунок 1.6. Подвижные звенья механизма 1-кулачок 2-ролик 3-коромысло Кинематические пары. О (1-0),вр.,5 кл. А (3-0),вр.,5 кл. В (2-3),вр.,5 кл. С (1-2),пост.,4 кл. Найдём число степеней свободы. W=3∙n-2∙P5-P4 W=3∙3-2∙3-1=2 Число степеней свободы равно 2. Так как W≠1, то присутствует лишнее звено - ролик. 2. Динамический анализ рычажного механизма 2.1 Определение скоростейДля заданной схемы механизма строим 12 положений. Определяем масштабный коэффициент построения механизма:
где,
Запишем длинны звеньев механизма на чертеже
Приступаем к построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример построения для положения №5: У кривошипа определяем скорость точки А
где,
Для построения вектора скорости точки А определяем масштабный коэффициент
где,
Для определения скорости точки B запишем систему уравнений:
Для определения скорости центра масс 2-го звена S2 воспользуемся соотношением:
где,
Соединив,
точку
Для определения скорости точки C запишем систему уравнениё:
Для определения скорости центра масс 4-го звена S4 воспользуемся соотношением:
где,
Соединив,
точку
Определим значения угловых скоростей звеньев.
Направление Скорости точек остальных положений определяются аналогичным образом. Все значения сводим в таблицу(2.1). Таблица 2.1 Значения линейных и угловых скоростей
2.2 Определение приведённого момента инерции звеньевПриведённый момент инерции определяется по формуле:
где,
Запишем формулу для нашего механизма:
Для 5-го
положения приведём расчёт, а для остальных положений сведём значение
Записав формулу (2.11) для положения №5 и подставив известные величины, получим:
Таблица 2.2 Приведённые моменты инерции
Для построения графика приведённого момента инерции необходимо Рассчитать масштабные коэффициенты.
где,
где,
2.3 Определение приведённого момента сопротивленияОпределим
максимальную силу
где,
Определим
расстояние от оси
На планах скоростей прикладываем все силы, действующие на механизм, и указываем их плечи. Составляем сумму моментов относительно полюса и решаем уравнение. Для 1-го положения:
где,
Находим момент привидения:
где,
Для 2-го положения:
Для 3-го положения:
Для 4-го положения:
Для 5-го положения:
Для 6-го положения:
Для 7-го положения:
Для 8-го положения:
Для 9-го положения:
Для 10-го положения:
Для 11-го положения:
Для 12-го положения:
Все значения сводим в таблицу. Таблица 2.4 Приведённые моменты сопротивления
Определяем масштабный коэффициент построения графика моментов сопротивления:
где,
По данным
расчёта строится график Путём
графического интегрирования графика приведённого момента строится график работ
сил сопротивления График работ
движущих сил Масштабный коэффициент графика работ:
где, Н полюсное расстояние для графического интегрирования, мм Н=60мм
Момент
движущий
Путём
вычитания ординат графика
По методу Ф.
Витенбауэра на основании ранее построенных графиков Определяем
углы
где,
Из чертежа
определим
Определяем момент инерции маховика
Маховик устанавливается на валу звена приведения. Определим основные параметры маховика.
где,
где,
3. Силовой анализ рычажного механизма 3.1 Построение плана скоростей для расчётного положенияРасчётным положением является положение №11. Построение плана скоростей описано в разделе 2. Масштабный коэффициент плана скоростей
3.2 Определение ускоренийОпределяем угловое ускорение звена 1.
где,
где,
Знак минуса
говорит о том, что кривошип ОА замедляется. Направляем Строим план ускорений для расчётного положения. Скорость точки А определяем по формуле
где,
Ускорение
где,
Ускорение
Из
произвольно выбранного полюса
Определим
длину вектора
Ускорение точки А определим из следующеё формулы:
Определим ускорение точки B из следующей системы уравнений:
Для определения нормальных ускорений точки В относительно точек А и С Воспользуемся следующими формулами:
Определим
длину векторов
Ускорение направляющей
Кореолисово
ускорение точки В относительно направляющей Ускорение точки В найдём, решив системе (3.7) векторным способом: Из вершины
вектора ускорения точки А ( проводим
прямую перпендикулярную звену АВ (линия действия Из плана
ускорений определяем вектор ускорения точки В и вектор тангенциального
ускорения
Ускорение сочки С определяем аналогично ускорению точки B.
Определим
длину векторов
Из полученных тангенциальных ускорений найдём угловые ускорения 2-го и 3-го звеньев:
Определим ускорения центров масс звеньев: Ускорение
центра масс 2-го звена
Из плана
ускорений
Ускорение
центра масс 4-го звена
Из плана
ускорений
Ускорения центров масс 3-го и 5-го звеньев равны ускорениям точек D и D’ соответственно:
Значения всех ускорений сведём в таблицу: Таблица 3.1 Ускорения звеньев
Страницы: 1, 2 |
|
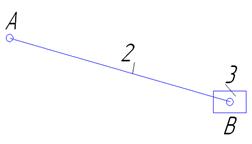 Группа 2-3 (Рисунок 1.2)
Группа 2-3 (Рисунок 1.2)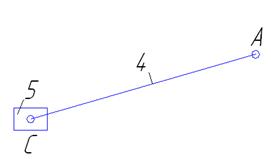 Группа 4-5 (Рисунок 1.3)
Группа 4-5 (Рисунок 1.3)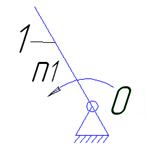
 (2.4)
(2.4) (2.6)
(2.6) (2.8)
(2.8) - для звена, совершающего сложное
движение
- для звена, совершающего сложное
движение - для звена,
совершающего вращательное или колебательное движения
- для звена,
совершающего вращательное или колебательное движения - для звена,
совершающего поступательное движение
- для звена,
совершающего поступательное движение (2.10)
(2.10)
 ,
,  ,
,  ,м (2,23)
,м (2,23) , (3.1)
, (3.1)
 , (3.7)
, (3.7)